
Os presentamos un caso clínico desarrollado en Neuron sobre la rehabilitación del miembro superior de un paciente tras sufrir un ictus, a través de la terapia ocupacional y la teoría del control motor.
1. PRESENTACIÓN DEL CASO
P. es un hombre de 70 años, que sufre un ictus hemorrágico parietal izquierdo el 01 de noviembre de 2019. No presenta factores de riesgo ni antecedentes personales o patologías de base relevantes, salvo hipercolesterolemia en tratamiento farmacológico.
Acude por iniciativa propia a NeurOn para ser valorado y comenzar a recibir tratamiento intensivo el día 21 de noviembre de 2019, tras ser dado de alta en el hospital.
Refiere dificultades generales en su día a día tanto a nivel personal como a nivel profesional (joyero), derivadas por los déficits presentes a nivel motor. En el momento de la valoración, vive en su domicilio habitual con su mujer y ha dejado de trabajar por imposibilidad para desempeñar las tareas propias de su oficio.
2. DEFINICIÓN DE ICTUS. DATOS EPIDEMIOLÓGICOS. IMPLICACIONES EN LA VIDA DIARIA.
Según la Sociedad Española de Neurología (SEN) podemos definir el Ictus (Accidente Cerebro Vascular – ACV) como “un trastorno brusco en la circulación sanguínea del cerebro que puede ser producido por oclusión arterial (el 85% de los casos) o por hemorragia (el 15%)”.
Actualmente, el ictus es la primera causa de muerte en España en mujeres (segunda en hombres), la primera causa de discapacidad adquirida en el adulto y la segunda de demencia. Se estima que cada año 120.000 personas sufren un ictus en España, de los cuales un 50% sufren secuelas funcionales o fallecen.
Las secuelas (motoras, sensoriales, cognitivas, conductuales o emocionales) que puede presentar una persona tras sufrir un ictus, afectan de manera directa al desempeño ocupacional de las actividades de la vida diaria (AVD), a la autonomía y funcionalidad.
3. EVALUACIÓN E INTERVENCIÓN
En primer lugar se realiza un screening inicial desde todas las áreas (Fisioterapia, Logopedia, Neuropsicología y Terapia Ocupacional) para evaluar las necesidades, limitaciones y fortalezas que presenta en el momento de la valoración. Tras la realización de la misma, concluimos que a nivel motor presenta limitaciones en el miembro superior afecto (derecho, mano dominante), no presentando más déficits motores, ni en funciones cognitivo-conductuales, emocionales, del lenguaje ni deglución. Dichos déficits suponen una gran limitación para el desempeño ocupacional de P. en sus actividades de la vida diaria.
Para realizar la valoración inicial y poder obtener datos cuantitativos de la situación de partida, empleamos las siguientes herramientas:
- Función motora: Escala Fugl Meyer.
- Destreza: Nine Hole Peg Test.
- Actividades de la vida diaria: FIM, Índice de Barthel, SIS, MAM-36.
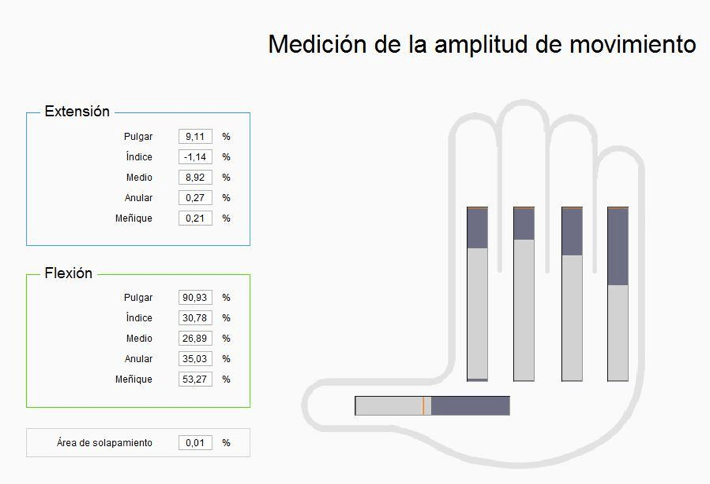
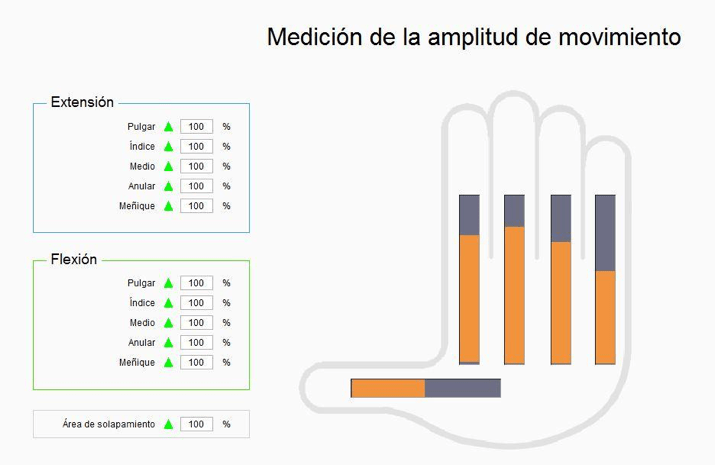
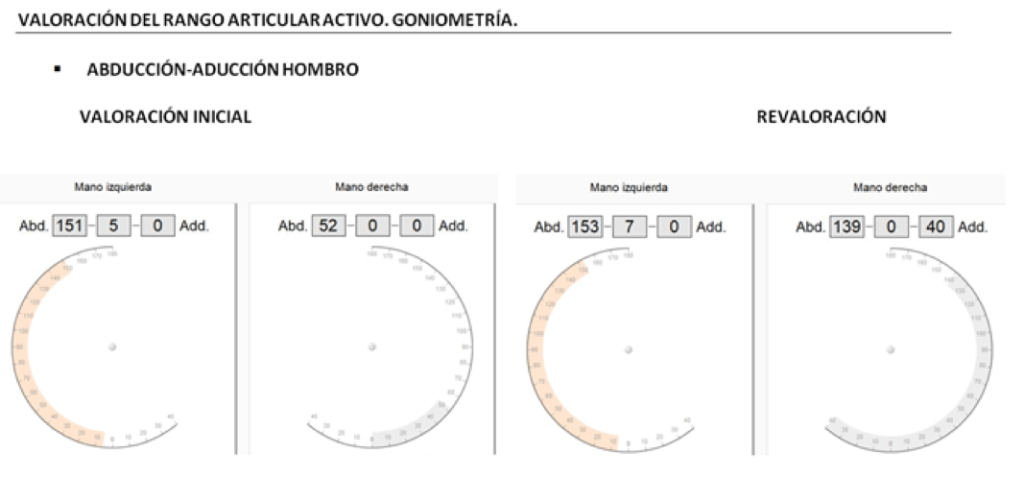
- Rango de movimiento: medición de Amadeo© y Pablo©.
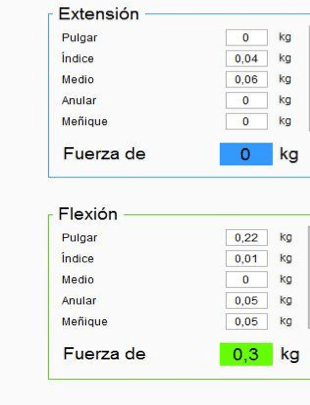
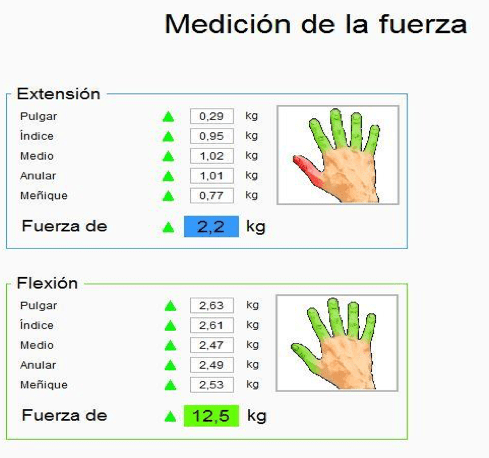
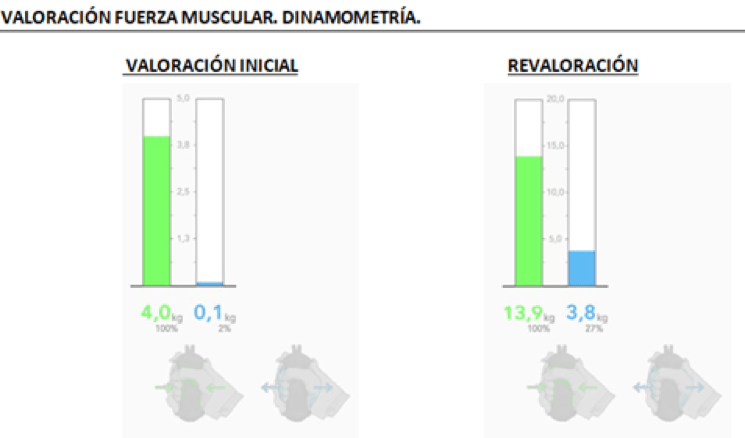
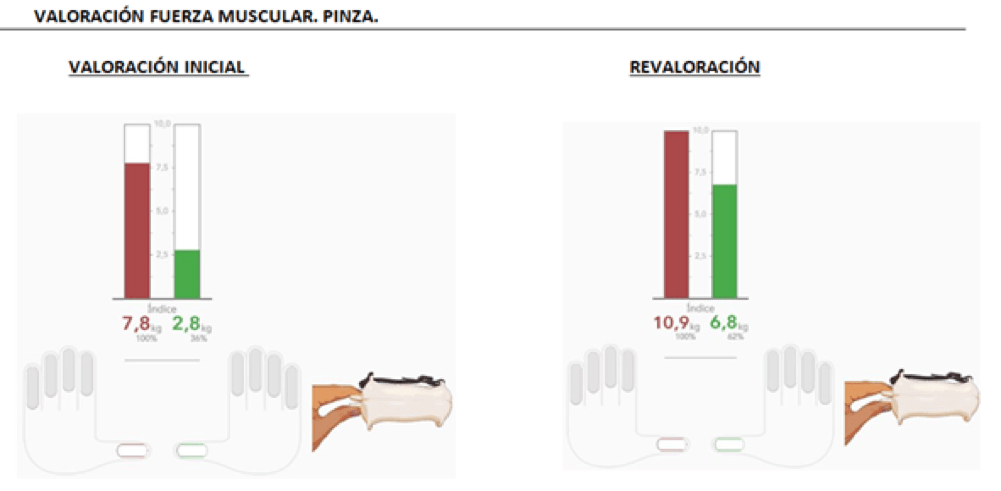
- Fuerza muscular: medición de Amadeo© y Pablo©.
En el inicio, P. no presenta movimiento voluntario a nivel distal ni proximal, muestra debilidad muscular generalizada y falta de precisión en el miembro superior derecho, por lo que le ha sido necesario realizar un cambio de dominancia y necesita ayuda para la realización de la mayoría de sus AVD.
Desde el área de Terapia Ocupacional, y de manera consensuada con el participante, se decide implementar un tratamiento intensivo de 100 horas repartidas en 2 sesiones diarias de una hora de duración cada una enfocado a recuperar la máxima funcionalidad y movimiento del miembro superior afecto.
El objetivo principal de tratamiento planteado por P. era la vuelta a la rutina, logrando la mayor funcionalidad de su mano derecha. Para ello, de manera conjunta, fuimos estableciendo los siguientes objetivos específicos encaminados a lograr ese objetivo general:
- Beber agua de un vaso
- Peinarse
- Abotonado
- Abrocharse los cordones
- Lavarse el pelo
- Utilizar las pinzas de trabajo, rodinar y pulir piezas pequeñas
- Afeitarse con maquinilla eléctrica
- Cepillado de dientes
- Limpiar piezas pequeñas de joyería con un cepillo
- Clavar un clavo con un martillo
- Conducir
- Introducir la clave de la alarma en el trabajo
- Batir un huevo
- Encender cerillas
Para hacer posible la consecución de los objetivos planteados, basamos nuestra intervención en los principios de aprendizaje y control motor: repetición, intensidad y cantidad de práctica.
Para ello, hemos empleado principalmente el abordaje de control motor orientado a actividades y/o entrenamiento orientado a tareas, utilizando siempre actividades activas, significativas, motivadoras y lo más realistas posibles, buscando la generalización del aprendizaje en su entorno habitual. Como coadyuvante, también se emplearon estrategias de fortalecimiento muscular, trabajo de coordinación y ritmo con el fin de poder desempeñar las actividades planteadas.
Por otro lado, para la consecución de la cantidad de práctica, repetición e intensidad necesarias, se ha empleado como complemento principal la terapia asistida por robots que aporta un feedback continuo que facilita al usuario el seguimiento de sus propios progresos, e implica una mayor motivación y adherencia al tratamiento. Algunos de los sistemas robóticos de Tyromotion© de los que disponemos en NeurOn y que se han utilizado durante este tratamiento, son:
- Amadeo©: mejora del control motor a través de la reeducación del movimiento voluntario (repetición e intensidad, acompañados en todo momento de feedback y elementos motivadores), fortalecimiento muscular (musculatura extrínseca e intrínseca de la mano), aumento del rango articular (apertura y cierre de la mano) y mejora de la capacidad para la disociación de los dedos.
- Pablo©: aumento de rango articular activo y fortalecimiento muscular a nivel proximal y distal (agarres, prensión y pinzas) de miembro superior, realización de movimientos aislados o más selectivos y combinación de varios movimientos para una misma tarea, así como ejercicios de coordinación y ritmo.
- Diego©: fortalecimiento muscular y aumento del rango articular a nivel proximal (hombro y cintura escapular) utilizando el sistema de suspensión, que nos ayuda a restar peso a la extremidad superior para posibilitar la realización de las actividades.
4. CONCLUSIONES Y RESULTADOS
Tras la intervención descrita, se objetivan grandes mejoras en varios aspectos relacionados con el miembro superior derecho y la funcionalidad de este. Se observa una mejora clara generalizada en el brazo derecho (hombro, codo, muñeca, mano y dedos) tanto en la movilidad y la fuerza muscular y de prensión, como en la destreza y coordinación para la realización de actividades uni y bimanuales. Ha mejorado el control motor voluntario del miembro superior derecho, P. es capaz de manipular objetos de manera segura y de realizar actividades necesarias en su día a día. Es importante destacar que todos los objetivos planteados durante el tratamiento se cumplieron, haciendo posible la “vuelta a la rutina” del participante tanto a nivel personal como profesional.
A continuación recopilamos los resultados cuantitativos de las herramientas de valoración pre y post realizadas:
TEST/ESCALA ADMINISTRADA | PUNTUACIÓN INICIAL | PUNTUACIÓN FINAL |
ÍNDICE DE BARTHEL | 80/100 | 100/100 |
ÍNDICE DE INDEPENDENCIA FUNCIONAL (FIM) | 103/126 | 125/126 |
NINE HOLE PEG TEST | MD No valorable MI 27” 81 | MD 26” 43 MI 22” 48 |
ESCALA FUGL-MEYER | 98/138 | 137/138 |
ESCALA DE IMPACTO DEL ICTUS (SIS) | 228/295 Recuperación Ictus: 50/100 | 292/295 Recuperación Ictus: 80/100 |
CUESTIONARIO DE CAPACIDAD MANUAL (MAM-36) | 100/144 Dolor: 1 | 143/144 Dolor: 0 |
Resultados cuantitativos más relevantes obtenidos a través de los dispositivos robóticos:
Valoración con Amadeo©:
Valoración Inicial
Revaloración
Valoración Inicial
Revaloración
Valoración con Pablo©: SENSOR DE MOVIMIENTO Y DISPOSITIVO DE BIORRETROALIMENTACIÓN

Melanie Retuerta Ruiz
Terapeuta Ocupacional en NeurOn
Nº. Col.: CAM0625
Carmen Jesús Luque Ruiz
Terapeuta Ocupacional en NeurOn
Nº. Col.: CAM0730






